Code as Policies
A framework utilizing language model-generated programs to enable robots to perform complex tasks through code-based policies.
Code as Policies
A framework utilizing language model-generated programs to enable robots to perform complex tasks through code-based policies.
YouTube Video: Code as Policies
A framework utilizing language model-generated programs to enable robots to perform complex tasks through code-based policies.
Code as Policies
SKU: code-as-policies
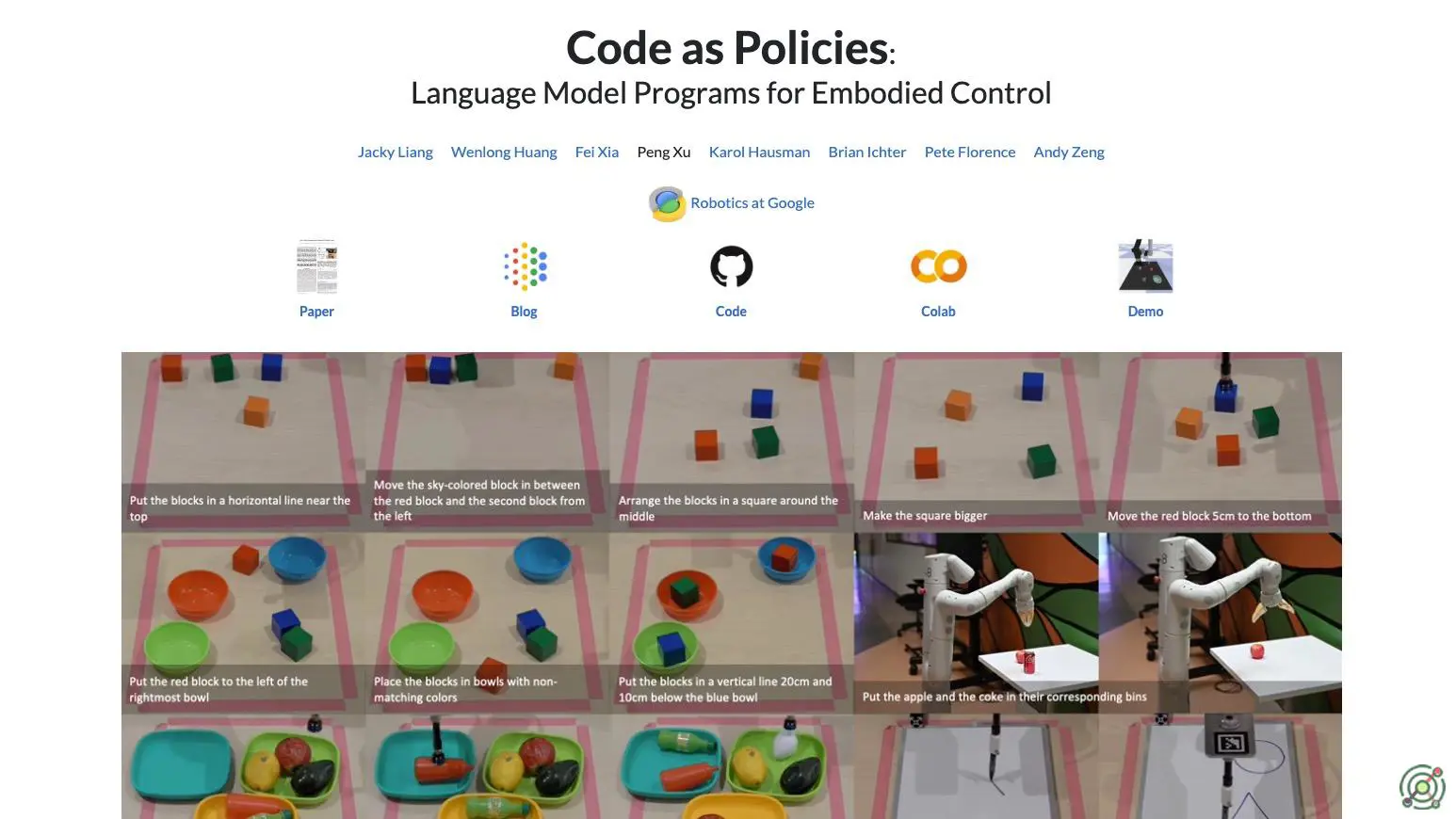
Code as Policies is a framework that leverages large language models (LLMs) to generate programs acting as policies for robotic control. By interpreting natural language commands, these models produce code that directs robots to execute complex tasks, integrating perception and control. This approach allows for the creation of both reactive and waypoint-based policies, facilitating advanced robotic behaviors across various platforms. The framework emphasizes the use of hierarchical code generation to manage intricate tasks, enhancing the adaptability and functionality of robotic systems.
Developing robotic systems capable of executing complex, multi-step tasks based on natural language instructions.
Enhancing robot adaptability by utilizing code-generated policies for diverse applications.
Advancing research in AI-driven robotics through the integration of language models and program synthesis.
Implementing flexible and interpretable control mechanisms in robotic platforms.
Code as Policies demonstrates high autonomy in generating robot policy code from natural language instructions without task-specific training, leveraging LLMs' ability to recombine API calls and synthesize new functions dynamically. It autonomously processes perception outputs (e.g., object detection), parameterizes control primitives, and handles spatial-geometric reasoning through Python code generation. However, autonomy is constrained by its reliance on predefined perception-action APIs and control primitives (e.g., impedance controllers), inability to self-verify code correctness prior to execution, and dependence on human-provided example prompts for few-shot learning. While it supports hierarchical code generation for complex tasks, full environmental adaptation requires pre-integrated libraries like NumPy rather than autonomous problem-solving.
Open Source
Contact